El músculo robótico blando de los ingenieros de Nebraska detecta y sella pinchazos en cuestión de minutos
Los ingenieros de Husker han demostrado en https://news.unl.edu/article/husker-engineers-advance-work-on-intelligent-self-healing-technology un músculo artificial que puede detectar lesiones, localizar el daño y repararse a sí mismo sin ayuda humana. La tecnología, desarrollada por Eric Markvicka y los estudiantes de posgrado Ethan Krings y Patrick McManigal, llegó a la final de los tres premios a la mejor ponencia en el IEEE ICRA 2025, lo que subraya su importancia técnica.
Los sistemas robóticos blandos suelen tomar prestada su flexibilidad de los tejidos biológicos, pero rara vez heredan el don de la naturaleza para la curación autónoma. La electrónica y los actuadores elásticos convencionales siguen funcionando sólo hasta que un pinchazo o un pico de presión cortan las trazas conductoras o rompen los elastómeros. El trabajo del equipo de Nebraska aborda de frente esa limitación incrustando la autoconciencia y la reparación en el propio actuador.
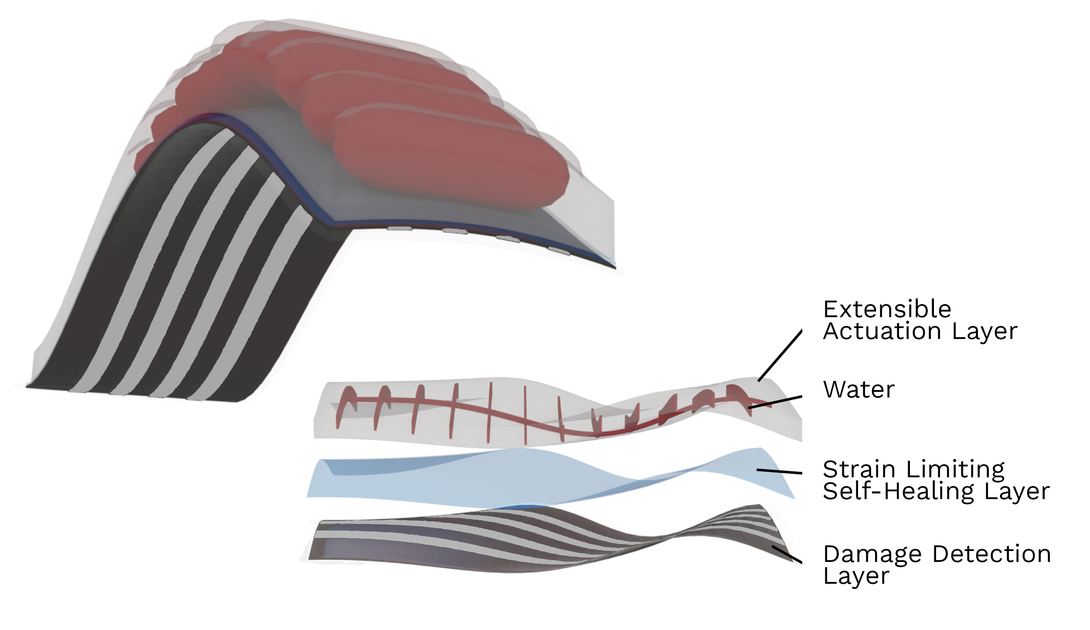
El músculo se basa en una pila de tres capas. En la base se asienta una "piel" hecha de microgotas de metal líquido dispersas en silicona; esta capa forma la rejilla del sensor. Un elastómero termoplástico rígido ancla el centro, suministrando material que puede fundirse y volver a sellarse. La capa superior impulsa el movimiento expandiéndose y contrayéndose bajo la presión del agua, convirtiendo la energía almacenada en trabajo mecánico.
Cinco bajas corrientes patrullan constantemente la piel inferior. Cuando un pinchazo crea un puente entre trazas vecinas, el circuito detecta un nuevo camino conductor, señala el lugar y aumenta automáticamente la corriente a través de ese punto. El calor Joule resultante ablanda la capa termoplástica, que fluye hacia la brecha y se adhiere a medida que se enfría, cerrando la herida en cuestión de minutos.
Un inteligente paso de reajuste mantiene el sistema reutilizable. Al aumentar aún más la corriente, los ingenieros desencadenan la electromigración, separando los átomos de metal y rompiendo el rastro temporal creado por la herida. La rejilla del sensor vuelve a su estado abierto original, lista para el siguiente impacto. Sin este restablecimiento, el actuador sólo se curaría una vez.
Las máquinas autorreparadoras podrían resultar valiosas en la agricultura, donde los robots se encuentran con espinas y escombros, y en los monitores de salud portátiles que soportan las flexiones diarias. Los dispositivos más longevos también reducirían los residuos electrónicos cargados de plomo y mercurio.
Fuente(s)
UNL (en inglés)

