Investigadores de la ETH de Zúrich presentan un robot de cuatro patas de IA ANYmal capaz de completar carreras de obstáculos como los K-9 en un campo de entrenamiento

ETH Züos ricos investigadores en robótica han presentado un robot cuadrúpedo ANYmal capaz de navegar por terrenos complejos utilizando módulos de IA altamente entrenados para el movimiento, la visión y la localización. Estos módulos de última generación amplían la gama de obstáculos y terrenos que los robots cuadrúpedos pueden recorrer de forma autónoma.
Anteriormente se había demostrado que los "perros" robóticos podían navegar por pasarelas limpias y pasillos de edificios, así como por colinas y terrenos al aire libre, pero dependían de humanos para guiar el entrenamiento, de largos tiempos de cálculo para determinar la mejor forma de moverse o de un conocimiento previo del entorno. La ETH Züevita estas limitaciones, y el ANYmal es capaz de recuperarse dinámicamente de las caídas y desplazarse por superficies complejas a pesar de estar totalmente entrenado dentro de una Nvidia Isaac Gym simulación sin supervisión.
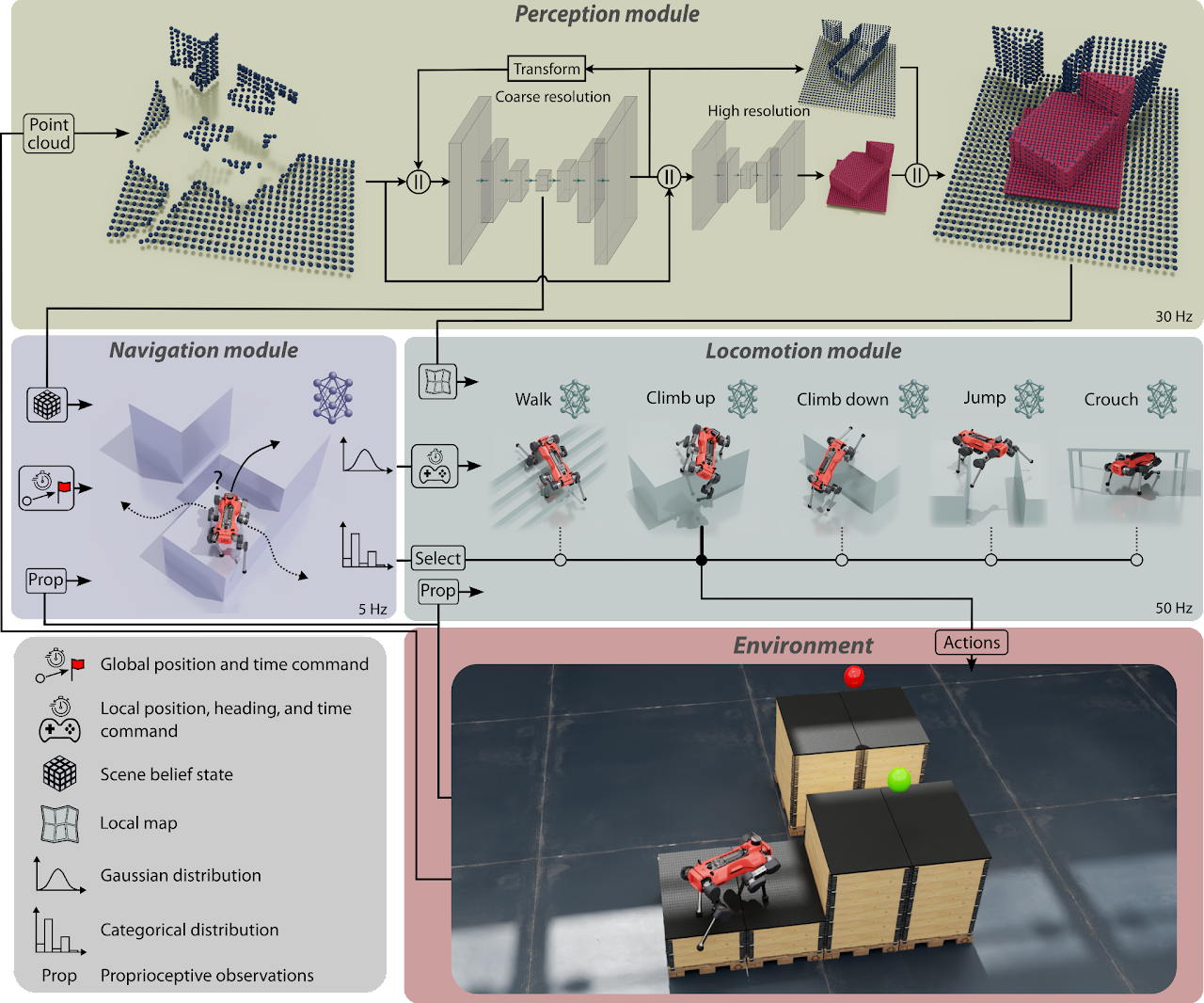
Tres módulos que componen el cerebro de la IA
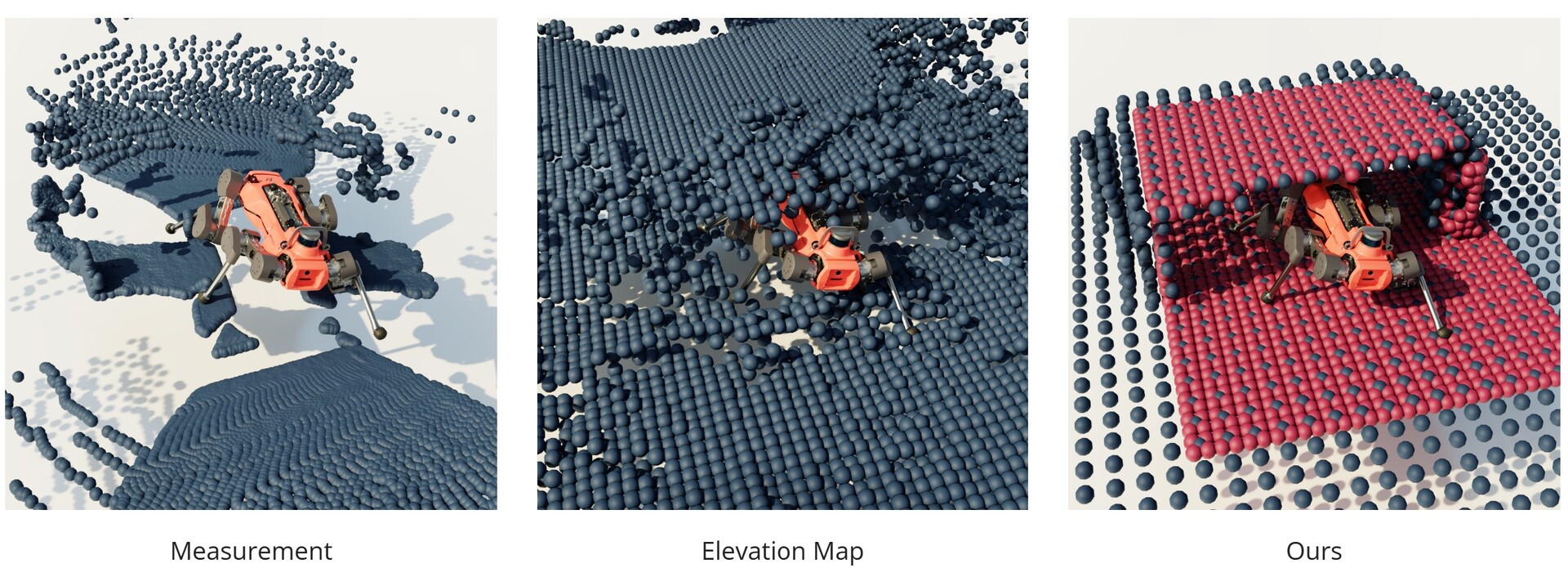
El módulo de visión ve el mundo utilizando seis Intel Realsense cámaras de profundidad y un Velodyne LiDAR alimentado por un Nvidia Jetson Orin controlador. Dado que el escaneado láser y por infrarrojos sólo devuelve la posición de puntos individuales, los robots se enfrentan a obstáculos al navegar por debajo de obstáculos o hacia lugares más elevados debido a la falta de información. Los investigadores de la ETH solucionan este problema reconstruyendo el mundo en 3D a partir de los escaneados.
El módulo de movimiento contiene cinco acciones: bajar, subir, agacharse, saltar y caminar. Cada una de ellas se entrenó con retos cada vez más difíciles. Por ejemplo, el robot virtual fue entrenado para agacharse debajo de mesas cada vez más bajas mientras avanzaba, o para saltar de una plataforma a otra mientras aumentaba la distancia.
El módulo de navegación toma lo que ve el módulo de visión y aprende a combinarlo con el rumbo, la posición y la sincronización que requiere cada habilidad de movimiento para completar recorridos simulados difíciles. El módulo se entrenó en 3000 recorridos de prueba y aprendió a navegar con más del 96% de éxito.
ANYmal en acción
Una vez que los tres módulos fueron entrenados en la simulación, el cerebro del software de IA se instaló en un robot ANYmal D de 55 kg impulsado por dos conjuntos de CPU Intel i7, 8 GB de RAM y 240 GB de SSD. Los vídeos del ANYmal completando recorridos en la vida real muestran su hábil capacidad para superar rápidamente terrenos difíciles y obstáculos que detendrían a otros robots.
Los lectores interesados en desarrollar habilidades en robótica deberían hacerse con un kit(como ésteen Amazon) junto con un libro para aprender sobre robots(como éste en Amazon).
Fuente(s)

