"El futuro ya está aquí": Por qué este robot humanoide necesita cuatro brazos
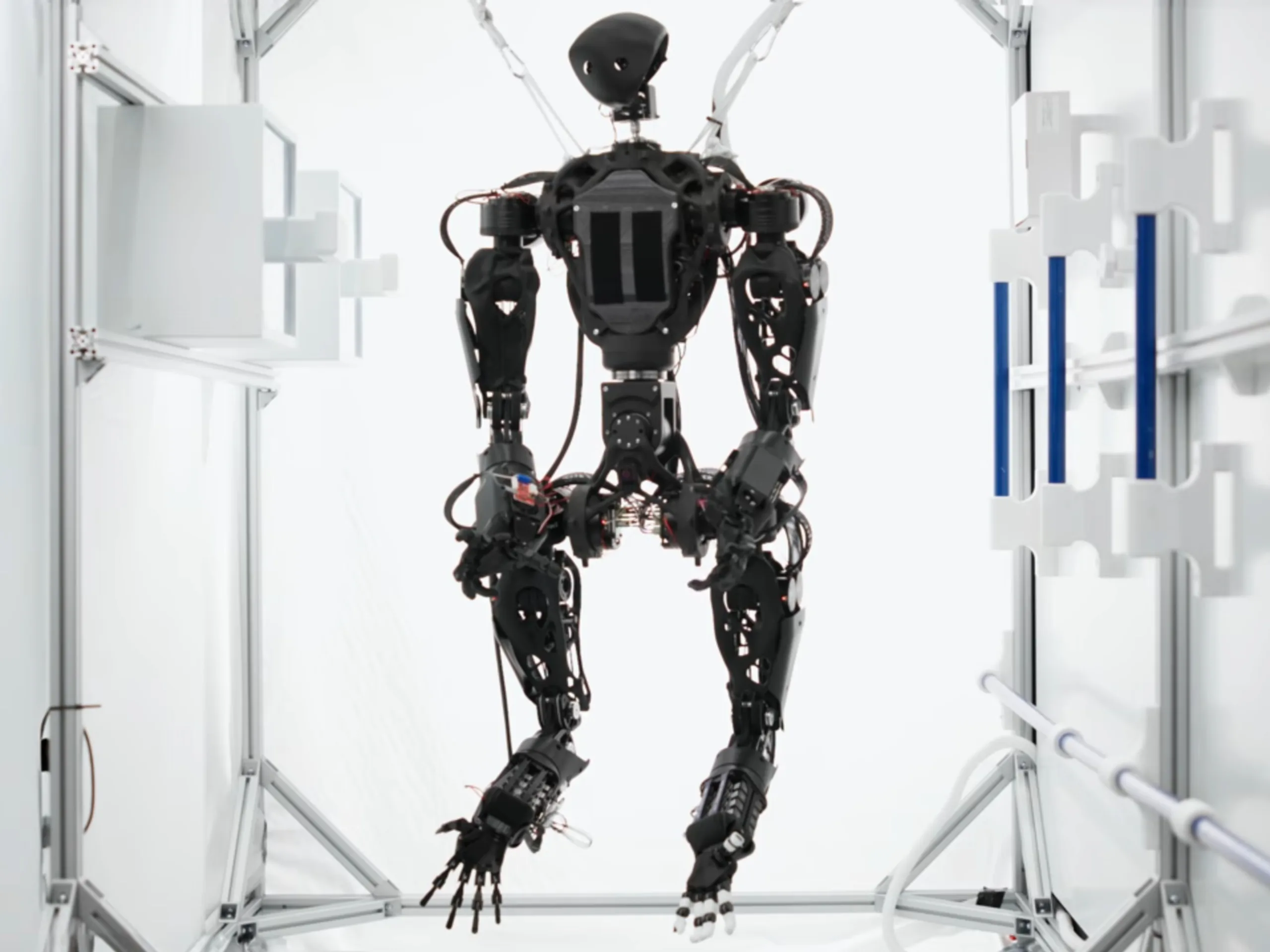
El 21 de mayo de 2026, el proyecto ORBIT Robotics de la ETH suiza presentó su modelo Helios. El vídeo que lo acompañaba se titulaba "El futuro ya está aquí ", una descripción que me parece bastante acertada. Helios tiene incluso más encanto de ciencia ficción que robots humanoides tan conocidos como el Optimus de Tesla o el G1 de Unitreede Unitree, ya que fue desarrollado específicamente para su uso en el espacio.
El Helios de ORBIT Robotics está destinado a apoyar a los astronautas en las estaciones espaciales en el futuro. Según el proyectouna gran parte del tiempo se dedica a tareas que son necesarias pero ofrecen escaso valor científico. Entre ellas se encuentran los flujos de trabajo de carga e inventario, como la descarga de entregas, la clasificación de equipos y el registro de los niveles de existencias. ORBIT cita alrededor de un 35% del tiempo de la tripulación para tareas de mantenimiento, unas 50 horas para un solo ciclo de descarga de carga y unos costes laborales de unos 140.000 dólares por hora de astronauta. Helios está diseñado para que el trabajo en el espacio sea más barato y eficaz. Pero, ¿por qué necesita el robot cuatro brazos?
Los brazos son más útiles que las piernas en microgravedad
Estar de pie y caminar sólo funcionan bajo la gravedad. En microgravedad, las piernas son prácticamente inútiles y como mucho podrían utilizarse para empujar superficies. Por eso ORBIT Robotics se ha limitado a sustituir las piernas de su robot humanoide por dos brazos adicionales, mucho más útiles en ingravidez o microgravedad. Esto debería permitir al robot desplazarse por el interior de las estaciones, mantener su posición y realizar tareas al mismo tiempo.
Helios también es interesante desde el punto de vista técnico. Sus brazos no se mueven de la forma convencional mediante pesados motores colocados directamente en las articulaciones, sino mediante un diseño accionado por tendones. Los motores se sitúan cerca de los hombros, mientras que los carretes, cables y mecanismos de redirección transfieren la fuerza a las articulaciones. Con ello se pretende aligerar los brazos y permitir movimientos más suaves. La denominada articulación de contacto rodante en el codo desempeña aquí un papel importante. Esta articulación está diseñada para combinar fuerza y flexibilidad: lo suficientemente robusta para las tareas operativas y, al mismo tiempo, permitir movimientos controlados y suaves.
Fuente(s)
Robótica orbital vía YouTube
Robótica orbital

